您可能感興趣的內(nèi)容
-
試驗(yàn)中心


-
技術(shù)標(biāo)準(zhǔn)平臺(tái)

-
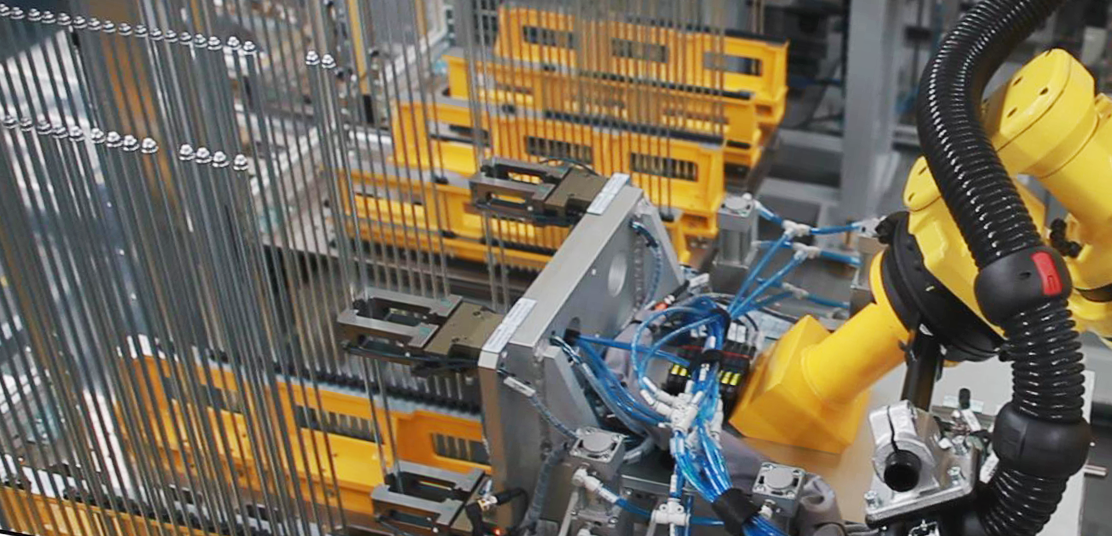
智能柔性裝配單元技術(shù)


-
MES系統(tǒng)


-
在線測(cè)量測(cè)試技術(shù)


-
多機(jī)型機(jī)器人柔性擰緊技術(shù)


-
EOL測(cè)試臺(tái)架

-
動(dòng)力鋰電池導(dǎo)熱棉
保護(hù)膜自動(dòng)分離技術(shù)

-
動(dòng)力鋰電池結(jié)構(gòu)膠及
導(dǎo)熱膠自動(dòng)涂布技術(shù)
-
氫燃料電池電堆
自動(dòng)堆疊技術(shù)
-
氫燃料電池三腔自動(dòng)
一體化氣密性檢測(cè)技術(shù)

-
新能源驅(qū)動(dòng)電機(jī)
U-PIN成型技術(shù)
-
新能源驅(qū)動(dòng)電機(jī)扭頭技術(shù)

-
新能源驅(qū)動(dòng)電機(jī)涂敷絕緣技術(shù)

-
智能模糊抓取轉(zhuǎn)運(yùn)技術(shù)

-
數(shù)字仿真技術(shù)

-
軟件系統(tǒng)開發(fā)


-
專 利